Sprzęt
Strona Główna / Sprzęt
Ręczny skaner X120Go SLAM LIDAR
Pomiar odbywa się w ruchu, wykorzystywany jest algorytm SLAM (Simultaneous Localization And Mapping), który łączy dane pochodzące z laserowej głowicy skanującej LiDAR oraz dane o przemieszczaniu się urządzenia zebrane przez jednostkę IMU.
Moduł RTK integruje skanowanie z lokalizacją GNSS – umieszcza chmurę w globalnym systemie odniesienia.
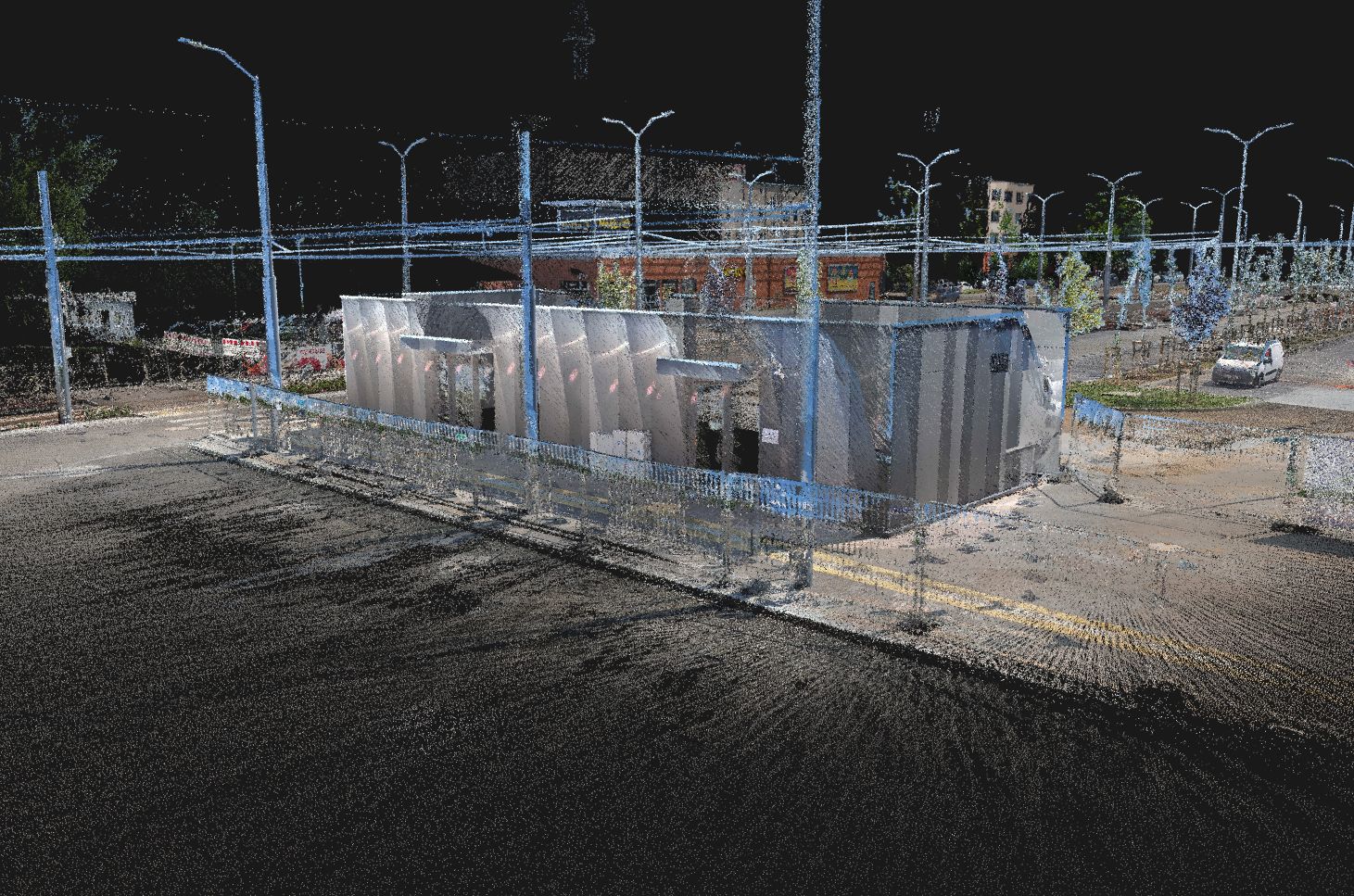
Wynikiem jest chmura punktów z widoczną trasą przemieszczania się skanera.
Chmura punktów, to zapis wyników pomiarów w postach współrzędnych XYZ każdego punktu, od którego odbiła się wiązka lasera.
Wykorzystanie skanera ręcznego umożliwia pozyskanie równomiernej chmury punktów i maksymalną eliminację „martwych pól” i zawsze możliwie najwierniej reprezentują rzeczywistość.
Technologia LiDAR umożliwia obrazowanie gruntu pomimo porastającej go roślinności.
Możliwe jest to dzięki rejestrowaniu przez skaner kilku lub nawet kilkunastu odbić impulsu laserowego. Dzieje się tak w wyniku zastosowania odpowiedniej wielkości plamki lasera umożliwiającej dotarcie nawet niewielkiej jej części do poziomu gruntu.
Podczas skanowania laserowego pozyskiwanych jest znacznie więcej informacji niż wyłącznie geometria obiektu- intensywność odbicia wiązki od obiektu, klasa do jakiej jest przypisany dany punkt, wartości RGB każdego z punktów.
Zalety skanowania laserowego przy użyciu skanera ręcznego:
- – dokładność – zestaw danych, które uzyskujemy, wyróżnia się bardzo dużą dokładnością – nawet do 1-2 mm ( szczególnie ważne przy określaniu powierzchni, kubatur, monitoringu obiektów)
– pewność – zastosowanie technologii skanowania laserowego ogranicza do minimum ryzyko wystąpienia błędów
– szybkość – ogromna ilość danych w krótkim czasie
– bezpieczeństwo – pomiary odbywają się z odległości, więc mogą być wykonywane dla obiektów w ruchu
– możliwość wykonywania pomiarów obiektów trudnodostępnych – komory podziemne, szyby, linie energetyczne, wieże, itp.
– możliwość połączenia z innymi pomiarami (np. z chmurami pozyskanymi z dronów) i łączne opracowanie.